Multi-Agent Planning (MAP) is a broad field with many applications, but its subfields remain mostly dispersed and uncoordinated. There has been a steady interest in multi-agent planning in recent years. Specifically, progress has been made in formalizing general models, algorithmic techniques, and solution concepts for the MAP problem and privacy-preserving algorithms. The main goal of this 6th Workshop on Distributed and Multi-Agent Planning (DMAP), as in the previous editions, is to bring researchers working in these subfields together and to bridge the gap between the planning and multi-agent systems communities.
Proceedings
The proceedings are now available here.
Invited Talk
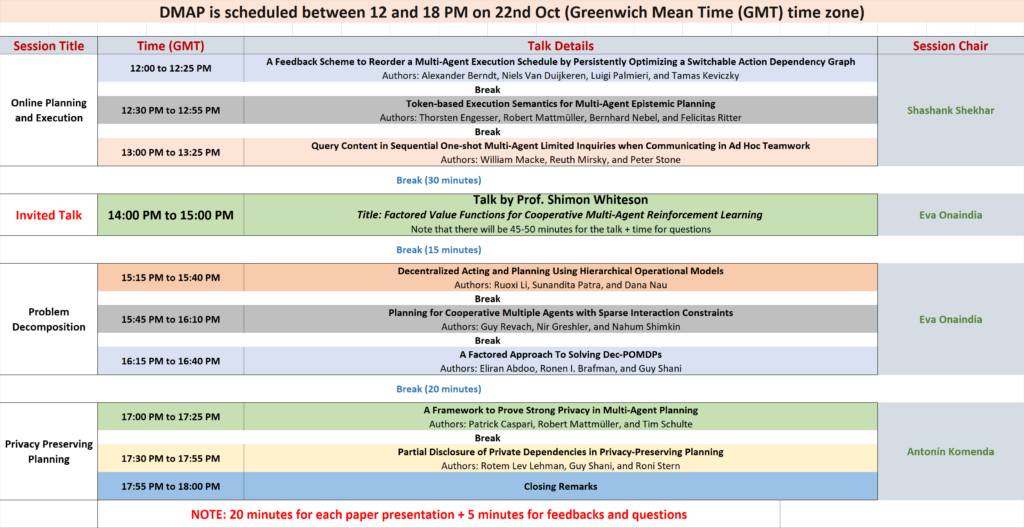
Prof. Shimon Whiteson gave a talk about Factored Value Functions for Cooperative Multi-Agent Reinforcement Learning.
News
- We have uploaded the videos/talks on YouTube!
- We are pleased to announce that Prof. Shimon Whiteson from the University of Oxford will be the invited speaker.
- The workshop will take place online via Zoom with access through Gather.
- Note that we will be recording all the presentations (except if someone is explicitly against it, so please let us know in that case).
Workshop Program
Topics
The organizing committee of DMAP 2020 invites paper submissions on topics related to distributed and multi-agent planning. Relevant topics to the workshop are, among others:
- Multiagent planning and scheduling applications
- Techniques to overcome multiagent planning complexity
- Plan coordination/merging
- Distributed planning and scheduling
- Multiagent planning system architectures
- Multi-robot systems
- Self-interested planning agents
- Game-theoretic planning
- Distributed planning under uncertainty
- Privacy in distributed planning
- Evaluation and benchmarks for distributed planning
- Centralized, decentralized, and factored multiagent planning
- Multiagent planning problem modeling techniques and languages
- Domain-dependent and domain-independent multiagent planning
- Heuristics for multiagent planning
CFP in plain-text form.
Important Dates
- Paper submission deadline:
July 26, 2020 (UTC-12 timezone) - Notification of acceptance:
August 14, 2020 - Camera-ready paper submissions:
Tuesday, September 22, 2020 (UTC-12) - Workshop date:
October 22, 2020
Submission Instructions
Submitted papers must be in PDF only, formatted in AAAI style. Refer to the author instructions on the AAAI website for detailed formatting instructions and LaTeX style files. Unlike at the main conference, there will be a high-quality single-blind review (where the authors do not know who the reviewers are), while each submission will be reviewed by at least two committee members against the standard ICAPS criteria of significance, soundness, scholarship, clarity, and reproducibility. However, the submission may be less evolved than at the main conference.
The workshop is meant to be an open and inclusive forum, and we encourage papers that report on work in progress or that do not fit the mold of a typical conference paper. Non-trivial negative results are welcome to the workshop, but we expect the authors to argue for the significance of the presented results to alternative lines of research on the topic of choice.
Authors considering submitting to the workshop papers rejected from the main conference, please ensure you do your utmost to address the comments given by ICAPS reviewers. Please do not submit papers that are already accepted for the main conference to the workshop. Submissions sent to other conferences are allowed. However, it is the responsibility of the authors to ensure that those venues allow for papers submitted to be already published in “informal” ways (e.g., on proceedings or websites without associated ISSN/ISBN).
Final papers will be in the same format, therefore keep them to at most 8+1 pages long (meaning 8 pages plus 1 extra page containing only references). We also welcome the submission of short/position papers (at most 4+1 pages long). Papers must be submitted by July 26, 2020. The deadline refers to 23:59 hours. The reference timezone for the deadline is UTC-12.
Paper submissions should be made through Easychair.
At least one author of each accepted paper must attend the workshop in order to present the paper. The authors must register for the ICAPS main conference in order to attend the workshop. There will be no separate workshop-only registration.
Organizers
- Ronen I Brafman (Ben-Gurion University of the Negev, Israel)
- Eva Onaindia (Universidad Politecnica de Valencia, Spain)
- Shashank Shekhar (Ben-Gurion University of the Negev, Israel)
Program Committee
- Shlomo Zilberstein (University of Massachusetts, Amherst, USA)
- Mathijs de Weerdt (Delft University of Technology (TU Delft), Netherlands)
- Ronen Brafman (Ben-Gurion University of the Negev, Israel)
- Anders Jonsson (Pompeu Fabra University, Barcelona, Spain)
- Guy Shani (Ben-Gurion University of the Negev, Israel)
- Eva Onaindia (Universidad Politecnica de Valencia, Spain)
- Roni Stern (Ben-Gurion University of the Negev, Israel)
- Antonín Komenda (Czech Technical University in Prague, Czech Republic)
Accepted Papers
- Alexander Berndt, Niels Van Duijkeren, Luigi Palmieri, and Tamas Keviczky. A Feedback Scheme to Reorder a Multi-Agent Execution Schedule by Persistently Optimizing a Switchable Action Dependency Graph — [video link]
- Thorsten Engesser, Robert Mattmüller, Bernhard Nebel, and Felicitas Ritter. Token-based Execution Semantics for Multi-Agent Epistemic Planning — [video link]
- William Macke, Reuth Mirsky, and Peter Stone. Query Content in Sequential One-shot Multi-Agent Limited Inquiries when Communicating in Ad Hoc Teamwork — [video link]
- Rotem Lev Lehman, Guy Shani, and Roni Stern. Partial Disclosure of Private Dependencies in Privacy-Preserving Planning — [video link]
- Patrick Caspari, Robert Mattmüller, and Tim Schulte. A Framework to Prove Strong Privacy in Multi-Agent Planning — [video link]
- Ruoxi Li, Sunandita Patra, and Dana Nau. Decentralized Acting and Planning Using Hierarchical Operational Models — [video link]
- Guy Revach, Nir Greshler, and Nahum Shimkin. Planning for Cooperative Multiple Agents with Sparse Interaction Constraints — [video link]
- Eliran Abdoo, Ronen I. Brafman, and Guy Shani. A Factored Approach To Solving Dec-POMDPs — [video link]
Submit camera-ready (final) PDF file electronically
To submit your camera-ready (final) PDF file electronically please follow the steps below:
- Go to the on-line submission system Easychair and log-in using your Easychair account (this should be the same account you have used to submit the paper proposal). Your username will be your email.
- Make sure that all author information is stored correctly on Easychair and matches the information on the PDF file. Author information (e.g. names, affiliations, etc.) that will be used from the Easchair system, if required, and not from the submitted PDF file.
- Final papers must be in PDF only, formatted in AAAI style. Keep them to at most 9 pages long.
- VERY IMPORTANT: name the camera-ready (final) paper using “CR” + the number assigned to your paper in Easychair (paper number) + paper title, must be separated by an underscore.
- Click on the “Update File” link, choose your pdf file, and then upload. Depending on the size of your file and your internet connection speed, the file upload may take a few seconds. If the file is uploaded successfully then a confirmation message will be displayed. You will also receive an email confirmation with the details of your submission. If you do not see the confirmation page after uploading your file, you may not have successfully completed your file upload. If you encounter trouble, please contact us.
Contact
Please direct all questions to the workshop organizers – Shashank Shekhar (BGU), Ronen Brafman (BGU), and Eva Onaindia (Universidad Politecnica de Valencia).