The motivation for using hierarchical planning formalisms is manifold. It ranges from an explicit and predefined guidance of the plan generation process and the ability to represent complex problem solving and behavior patterns to the option of having different abstraction layers when communicating with a human user or when planning co-operatively. The best-known formalism in the field is Hierarchical Task Network (HTN) planning. In addition, there are several other hierarchical planning formalisms, e.g., hybrid planning (incorporating aspects from POCL planning), Hierarchical Goal Network (HGN) planning (incorporating a hierarchy on goals), or formalisms that combine task hierarchies with timeline planning (e.g. ANML). Hierarchies induce fundamental differences from classical planning, creating distinct computational properties and requiring separate algorithms from non-hierarchical planners. Many of these aspects of hierarchical planning are still unexplored. Thus, we encourage any contribution, independent of the underlying hierarchical planning formalism, and want to provide a forum for researchers to discuss the various aspects of hierarchical planning.
Attending HPlan — online and for free!
Current up-to-date information (see new headline on gather.town) below!
(date: 22.10., 10:00 pm GMT)
Just like the main conference, the HPlan (online) workshop will also be carried out via gather.town (see screenshot below). The HPlan venue will just be one of the many workshop rooms within the virtual ICAPS venue. Just register (for free) for the ICAPS conference, and you can already join and explore the venue.
The workshop will take place on Friday, October 23th, 18:00-21:00 (GMT). (Some interesting time zones: Germany: 20:00-23:00, US (Minneapolis): 13:00-16:00, Australia (Canberra/Sydney): 05:00-08:00 the next day.)
We will have an invited talk by Robert Goldman (details see below). All papers are going to be presented by 3 to 5 minute teaser talks (pre-recorded and made available via YouTube), followed by a poster session. For the poster session, every presenter has a dedicated space where his or her avatar will wait. Interested attendees will walk towards that presenter (or any other person!) which results in sharing video and audio. So we will have (at least) six clusters of people according to the map outlined below. The presenter of a talk will most likely share his or her screen to show an actual poster (or any other kind of information/content) explaining the work.
Schedule:
18:00 – 18:45: Invited Talk by Robert Goldman (approx. 30 minutes talk + 15 minutes Live Q&A)
18:45 – 19:00: 15 minutes “coffee” break, please bring your own favorite drink! 🙂
19:00 – 19:30: Teaser talks for the six papers
19:30 – 21:00: Poster session (see map below for mapping for position to poster/paper)
Note that we will publish the YouTube URLs for the invited talk and the teaser talks here soon, but they will be streamed live, so don’t miss watching them! Afterwards bring your attention back to the HPlan gather.town room for live Q&A and interesting discussions and community building! The Live Q&A will be handled via a Zoom room, the link to which is shared via gather.town. Most likely we will also play all videos via screen-sharing on that Zoom room so you don’t have to access this website to obtain the video links. We recommend to test gather.town (and Zoom, if possible) prior to the workshop so no time is lost during the event.
Since the conference is free we encourage you to promote our workshop to interested colleagues and students!
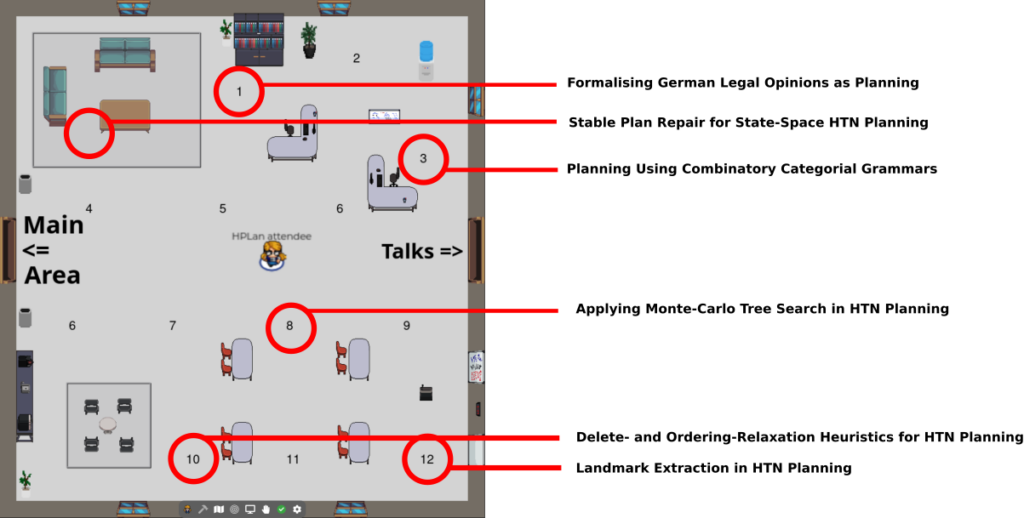
above 4: Stable Plan Repair for State-Space HTN Planning by Robert P. Goldman, Ugur Kuter, and Richard G. Freedman
3: Planning Using Combinatory Categorial Grammars by Christopher Geib and Janith Weerasinghe
8: Applying Monte-Carlo Tree Search in HTN Planning by Julia Wichlacz, Daniel Höller, Alvaro Torralba, and Jörg Hoffmann
10: Delete- and Ordering-Relaxation Heuristics for HTN Planning by Daniel Höller, Pascal Bercher, and Gregor Behnke CHANGE: This paper will be presented by Gregor Behnke at his own poster stand!
12: Landmark Extraction in HTN Planning by Daniel Höller and Pascal Bercher
Useful information regarding gather.town
- Please use your full name for your Avatar.
- Please use the button “g” while walking to enable the ghost mode, thus preventing from opening audio and video connections while just walking by other people. That way you can also walk through others.
- The poster discussions will be done on gather.town by simply meeting in groups, so just walk to the speaker as shown in the graphic. The speaker will then share his/her screen. Note that video is limited to 9 people per group, but there is no limit to the number of people that can join via audio.
- Note that under the line of videos in gather.town there is a double-arrow pointing to the bottom. If you hit it you see all group members like you would in Zoom.
- The videos (Robert’s invited talk and the teasers) as well as the Q&A for the invited talk will be done via Zoom. (The videos are also on YouTube, but you don’t need this if you join the Zoom session.) In order to join these Zoom sessions, you need to walk into HPlan’s “talks” room, which is on the right of the main HPlan room. Once you are in there hit “x” and you will get the Zoom link thus temporarily leaving gather.town.
- Note that the people presenting a poster might also want to attend a poster, so some posters might temporally not be presented at all — just like in real life!
- Need further help?
- Our YouTube links:
Invited Talk
Robert Goldman will give an invited talk about:
HTN Planning: Interactions of Theory and Practice
For many years my colleagues and I have been doing applied research with automated planning, and especially HTN planning. Because of their expressive power, HTNs are well-suited to a wide variety of planning applications. However, during this time it has become clear to me that our tools for understanding HTNs lag behind their expressive power. While we have bragged about the expressive advantages of HTNs, we have often relied on analytic models for HTN planning that are only appropriate to simpler schools of planning. In this talk, I will discuss several related issues, including the meaning of HTN methods, how we can know that an HTN method is correct, what it means to execute an HTN plan, and the tensions between our models of HTN planning and its applications. I will suggest that these questions offer exciting research opportunities, and suggest some directions for such research.
Bio
Robert P. Goldman
Research Fellow, Smart Information Flow Technologies (SIFT)
Dr. Goldman’s research interests lie in automated planning, reasoning under uncertainty, and the relationship of both of these topics with formal methods. For many years he has worked on HTN planning (most recently with SHOP3, the successor to SHOP2), and on planning timed controllers (in the context of the CIRCA hard real-time AI architecture). His earliest work concerned the use of Bayesian networks for natural language understanding and plan recognition, as part of which he helped develop knowledge based model construction, the precursor of probabilistic programming languages. In other work, he has developed timed automata semantics for CIRCA’s controllers, algorithms for exploiting these semantics to efficiently plan/synthesize them, using model-checker counterexamples to guide backjumping, and the technique of dynamic abstraction planning, which locally refines abstract state representations while planning. As part of his early work on planning under uncertainty, he introduced the concept of conformant planning.
Topics
Topics of interests include but are not limited to:
- theoretical foundations, e.g., complexity results
- heuristics, search, and other solving techniques for plan generation
- techniques and foundations for providing modeling support
- challenges and lessons learned from modeling systems (using hierarchical models)
- applications of hierarchical planning
- plan explanation for hierarchical models
- hierarchical plan repair techniques
- techniques for verifying solutions of hierarchical planning problems
Important Dates
Since ICAPS has been postponed we re-opened for new submissions until further notice. We’ll update this page once we know more. Until then you can also reach out to us organizers.
- Submission deadline:
March, 7thJuly, 20th (extended!) - Notification of acceptance:
April, 4thAugust, 14th (extended)August, 29th (delayed) - Camera-ready paper:
September, 30th - pre-recorded (teaser) talk submission: October, 10th
- The online workshop: Friday, October 23th, 18:00-21:00 (GMT) for free on gather.town!
We encourage the submission of papers that are, at the time of submission, currently under review at IJCAI 2020 or SoCS 2020. In case such a double submission gets both accepted at IJCAI/SoCS and at the workshop, the camera-ready paper for the workshop might be the same as for IJCAI/SoCS or a (new) extended abstract of this paper of at most two pages including references (authors’ choice).
Submission Instructions
The formatting guidelines are the same as for ICAPS 2020 (link to authorkit: https://www.aaai.org/Publications/Templates/AuthorKit20.zip). Authors may submit long papers (up to 8 pages plus up to one page of references) or short papers (up to 4 pages plus up to one page of references). In case of acceptance, the full 5, resp. 9, pages can be used for the paper, e.g. to address the reviewers’ comments.
Like at the main conference, there will be a high quality double-blind review process against the standard ICAPS criteria of significance, soundness, scholarship, clarity, and reproducibility. However, submissions may be less evolved than at the main conference.
In addition to standard technical papers we also encourage the submission of position/challenge papers (which have to be short papers) that can report on preliminary results, some initial ideas on how to tackle a problem, or simply describe an interesting problem itself that’s related to hierarchical planning. The main idea behind this category is the possibility to exchange ideas and foster discussion at the workshop — not to present some significant contribution.
The submission system is now open: https://easychair.org/conferences/?conf=hplan2020
Accepted Papers
- Formalising German Legal Opinions as Planning by Gregor Behnke.
- Landmark Extraction in HTN Planning by Daniel Höller and Pascal Bercher
- Planning Using Combinatory Categorial Grammars by Christopher Geib and Janith Weerasinghe
- Stable Plan Repair for State-Space HTN Planning by Robert P. Goldman, Ugur Kuter, and Richard G. Freedman
Some papers that were under review at HPLAN were simultaneously submitted at other conferences and accepted there. They will be presented at HPLAN as well:
- Applying Monte-Carlo Tree Search in HTN Planning by Julia Wichlacz, Daniel Höller, Alvaro Torralba, and Jörg Hoffmann. Accepted at SoCS 2020.
- Delete- and Ordering-Relaxation Heuristics for HTN Planning by Daniel Höller, Pascal Bercher, and Gregor Behnke. Accepted at IJCAI 2020.
Download the Workshop Proceedings
Program Committee
Ron Alford,
Roman Bartak,
Gregor Behnke,
Pascal Bercher,
Susanne Biundo,
Rafael C. Cardoso,
Kutluhan Erol,
Christopher Geib,
Florian Geißer,
Patrik Haslum,
Daniel Höller,
Dana Nau,
Conny Olz,
Sunandita Patra,
Mak Roberts,
Vikas Shivashankar,
Julia Wichlacz,
Zhanhao Xiao
Do you want to support us by joining the PC board this or in one of the following years? Email us!
Organizers
Pascal Bercher, https://cecs.anu.edu.au/people/pascal-bercher
Daniel Höller, http://fai.cs.uni-saarland.de/hoeller/index.html
Roman Bartak, http://ktiml.mff.cuni.cz/~bartak
Ron Alford, http://www.volus.net/
(Click on a person’s name to get their email address.)
Various
- This year, the IPC 2020 features a track for HTN planning. Interested? Please contact the organizers! Visit ipc2020.hierarchical-task.net.
- List of previous HPlan workshops (with links to papers and descriptions of invited talks)
- HPlan 2018: http://icaps18.icaps-conference.org/hierarchicalplanning/
alternatively: http://hplan2018.hierarchical-task.net - HPlan 2019: http://icaps19.icaps-conference.org/workshops/Hierarchical-Planning/
alternatively: http://hplan2019.hierarchical-task.net
- HPlan 2018: http://icaps18.icaps-conference.org/hierarchicalplanning/
- You are interested in Hierarchical Planning? Join our low traffic, moderated mailing list (address omitted to prevent SPAM) that only allows mails related to hierarchical planning! (More than 70 subscriptions until early 2020.) Drop Pascal an email.